- Détails
-
Catégorie : Sécurité
-
Publication : mercredi 14 octobre 2020 14:22
-
Écrit par Bensky
-
Affichages : 13494
Sécurité de fonctionnement
Au niveau de la sécurité de fonctionnement, il y a la norme IEC61508 qui est la norme pour la sécurité de fonctionnement des systèmes industriels.
La sécurité de fonctionnement est appelé le FMDS (Fiabilité, Maintenabilité, Disponibilité, Sécurité) ou RAMS en anglais (Reliability, Availability, Maintenability and safety).
Fiabilité : La fiabilité est l'aptitude d'un composant ou d'un système à fonctionner pendant un intervalle de temps. Elle permet de définir la robustesse d'un produit et de connaitre le temps qu'il fonctionnera avant d'avoir une défaillance. La fiabilité est exprimé en défaillance par heure. Au niveau international, on l'exprime en 10-9 def/heure, ce qui correspond à un FIT (Failure in time). 1FIT=10-9 def/heure.
Le taux de défaillance est appelé lambda et est exprimé en Défaillance/heure.
Maintenabilité : La maintenabilité est l'aptitude d'un composant ou d'un système à être maintenu ou remis en état de fonctionnement.
Disponibilité : La disponibilité est l'aptitude d'un composant ou d'un système à être en état de marche à un instant donné. La disponibilité d'un composant permet de savoir quand est ce que ce composant est opérationnel.
Sécurité : La sécurité est l'aptitude d'une entité à ne pas conduire à des accidents inacceptables. Plus précisément, la sécurité est l'aptitude d'un produit à respecter, pendant toutes les phases de vie, un niveau acceptable de risques d'accident susceptible de causer une agression du personnel ou une dégradation majeure du produit ou de son environnement.
Ces 4 domaines du FMDS permettent de définir la Sécurité de fonctionnement.
La sécurité de fonctionnement est géré par des niveaux sécuritaires qui sont des niveaux SIL SIL 0-1-2-3-4.
Ensuite pour tenir ces niveaux SIL, il faut réaliser une démarche qui comprend plusieurs étapes:
- Analyse fonctionnelle externe (AFE)
- Analyse fonctionnelle interne (AFI)
- AMDEC : Analyse Mode de défaillance et d'effet et de criticité.
- AdD : Arbre de défaillance.
L'AMDEC et l'Arbre de défaillance sont les documents les plus utilisés en SDF.
Pour plus de détail, vous pourrez regarder SDF via le FMDS.
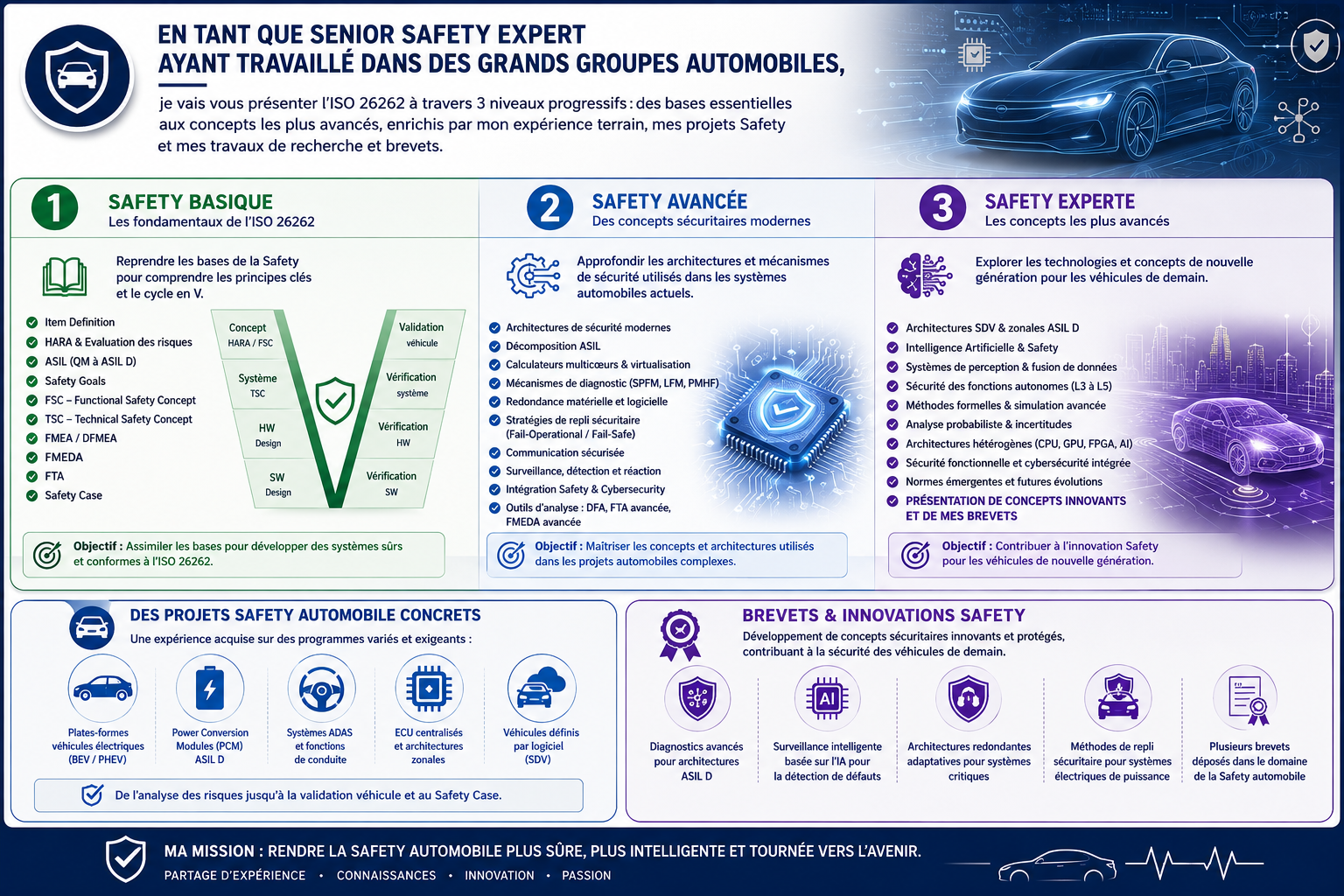
Ensuite, après l'IEC61508, une nouvelle norme pour l'automobile a été développée, la norme ISO 26262.

Ainsi, pour respecter un développement en sécurité au niveau AUTOMOBILE, il faut respecter la norme ISO 26262.
Au niveau ISO 26262, la sécurité est évalué à l'aide des niveaux ASIL A-B-C-D.
Voici le cycle de développement de la norme ISO 26262.

Au niveau de la norme, il y a 10 parties importantes :
1 Glossaire
2 Gestion sécuritaire fonctionnel
3 Phase de concept
4 Développement du produit : niveau Système
5 Développement du produit : niveau Hardware
6 Développement du produit :Niveau logiciel
7 Operation et production
8 Support du process
9 ASIL et Analyse sécuritaire.
10 guide de l'ISO 26262.
Le cycle de développement pour la sécurité est basé sur un cycle en V.

Cycle de développement sécuritaire.
Le cycle de développement sécuritaire est composé des documents suivants :
- SADP
- PHA
- AFE (si nécessaire)
- AFI (Si nécessaire)
- SFMEA
- FSC
- TSC
- FTA
- FMEDA
- Safety test
- Safety test plan
- Safety case
Voici les activités d'un cycle de développement sécuritaire.
1 SADP : Plan de développement sécuritaire.
Faire un plan de développement sécuritaire en définissant les activités et le planning associé. Cette partie permettra de définir les documents à réaliser avec les dates.
2 AFE : Analyse fonctionnelle externe
L’analyse fonctionnelle externe définit les fonctions de services et de contraintes du produit.
3 PHA : Analyse préliminaire de risque (APR)
L’analyse préliminaire de risque permet de définir les évènements redoutés avec les modes de défaillances associés. Cette analyse préliminaire permet de définir les objectifs sécuritaires.
4 AFI : analyse fonctionnelle interne
L’analyse fonctionnelle interne permet de définir les fonctions techniques.
5 SFMEA : AMDEC system
L’AMDEC système permet de définir les modes de défaillances avec leur effet et leur criticité.
6 FTA : Arbre de défaillance
L’arbre de défaillance permet de définir les défaillances d'un produit.
7 FSC : concept sécuritaire fonctionnel
Le concept sécurité fonctionnel permet de définir les exigences fonctionnelles sécuritaires et les FTTI.
8 TSC : Concept sécuritaire technique.
Le concept sécurité technique permet de définir les exigences techniques sécuritaires et les mécanismes de sécurité.
9 FMEDA : AMDE D Analyse Mode de défaillance et effet et diagnostique.
La FMEDA permet de quantifier les mécanismes de sécurité avec les couvertures de diagnostiques. Cette FMEDA permet de calculer les métriques de pannes directes SPFM et les métriques des pannes latentes.
10 Safety Test Plan : Plan sécuritaire de test.
Le plan sécuritaire de test permet de définir les plans de test pour la partie dysfonctionnel. On injecte des défauts et on vérifie si les mécanismes de sécurité sont efficaces pendant le test dysfonctionnel.
11 Safety test hardware /software.
Après avoir défini les concepts sécuritaires techniques et fonctionnels et avoir défini les tests sécuritaires, on s’occupe de réaliser les tests sécuritaires.
12 Safety test intégration composant
Cette partie réalise les tests sécuritaires au niveau composant.
13 Safety test intégration système.
Cette partie réalise les tests sécuritaires au niveau système.
14 Safety test intégration qualification
Cette partie réalise les tests sécuritaires au niveau qualification.
15 Dossier de sécurité. (Safety case)
Le dossier de sécurité permet de vérifier que tous les documents ont bien été réalisés et que les concepts sécuritaires ont bien atteint les objectifs demandés avec les métriques sécuritaires au bon niveau.
La société CSEEP propose de réaliser tous les documents d’un développement sécuritaire avec l’objectif d’atteindre les niveaux sécuritaires demandés. ASIL A-B-C-D.
La société CSEEP est spécialisé dans les conseils pour les architectures sécuritaires de niveau ASIL C et ASIL D.
Les clients de la société CSEEP :
Produit électronique sécuritaire.*
- Convertisseur DC/DC ASIL C (pas de norme à l'époque) JCAE -VALEO.
- Doseur K9 ASIL C (JCAE passé VALEO)
- DAE A5X (Delphi)
- CMM DV6C ASIL C (PSA)
- Calculateur véhicule ASIL C (PSA)
- Véhicule électrique ASIL D (PSA)
- Batterie DC/DC ASIL D (PSA)
- ISTARS –IBSG – GMG ASIL C (VALEO)
- Véhicule autonome ASIL D (RENAULT)
*Produits sur lesquels le fondateur de CSEEP a travaillé.